H1 and H1_2 humanoid robot
UK stock. UK based support by expert roboticists who also use H1 for R&D and projects. 1 year warranty and support anywhere in UK included.

Introducing Unitree's inaugural general-purpose humanoid robot, the Unitree H1, a pioneering marvel that redefines the boundaries of robotic innovation. Boasting an advanced powertrain, this cutting-edge creation stands at the forefront of speed, power, maneuverability, and flexibility in the realm of robotics. With a stable gait and remarkably flexible movement capabilities, the Unitree H1 autonomously navigates complex terrains and environments, seamlessly transitioning between walking and running. Its sophisticated sensory suite, featuring a combination of 3D LiDAR and depth camera technology, ensures real-time acquisition of high-precision spatial data, enabling panoramic scanning for unparalleled situational awareness. The Unitree H1 sets a new standard in general-purpose humanoid robotics, embodying a harmonious blend of agility, autonomy, and sensory prowess.
The World's most affordable and most powerful humanoid robot.

Upgradable with differnet heads and hands.HEAD360 and 5 finger 14 DoF hands.
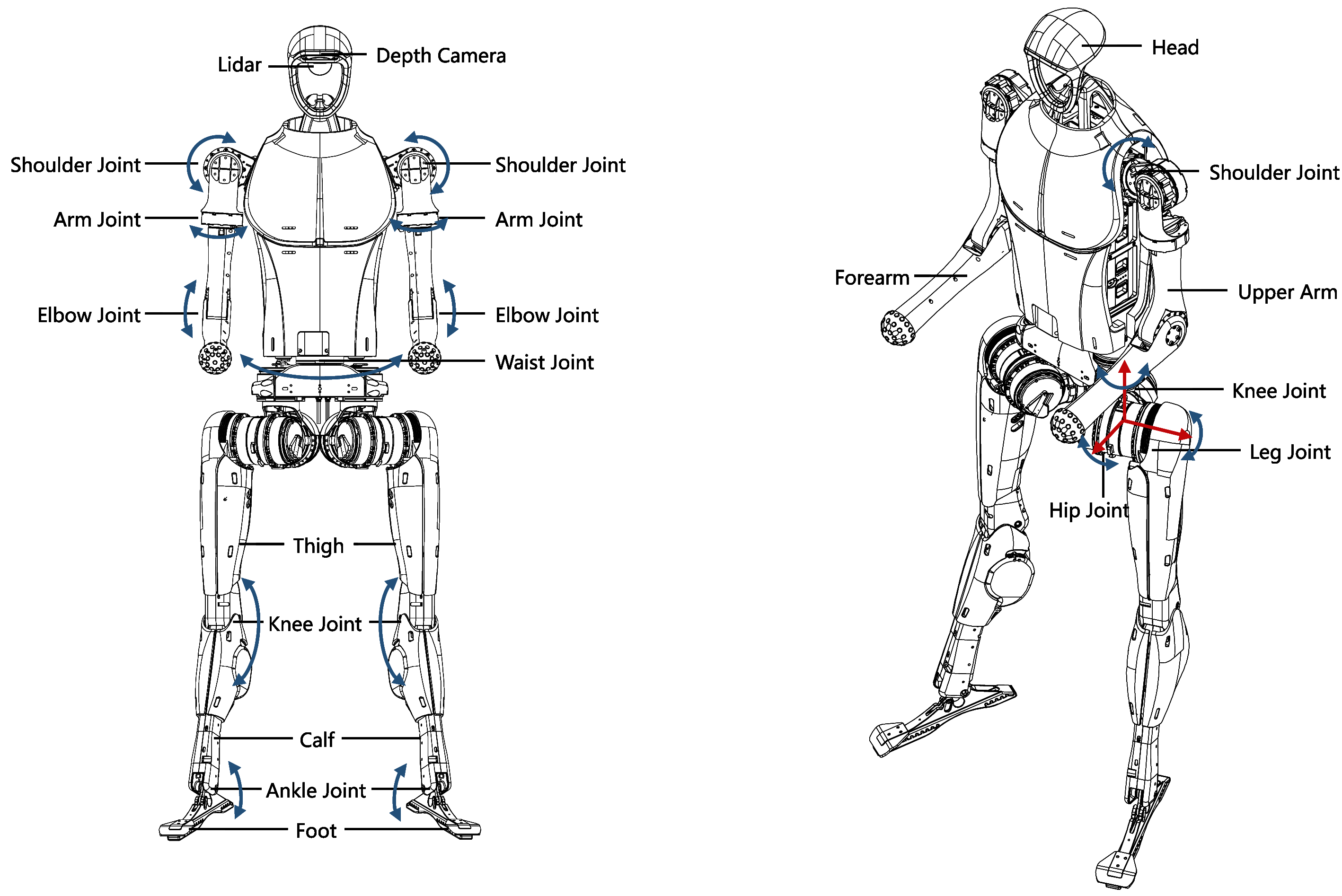
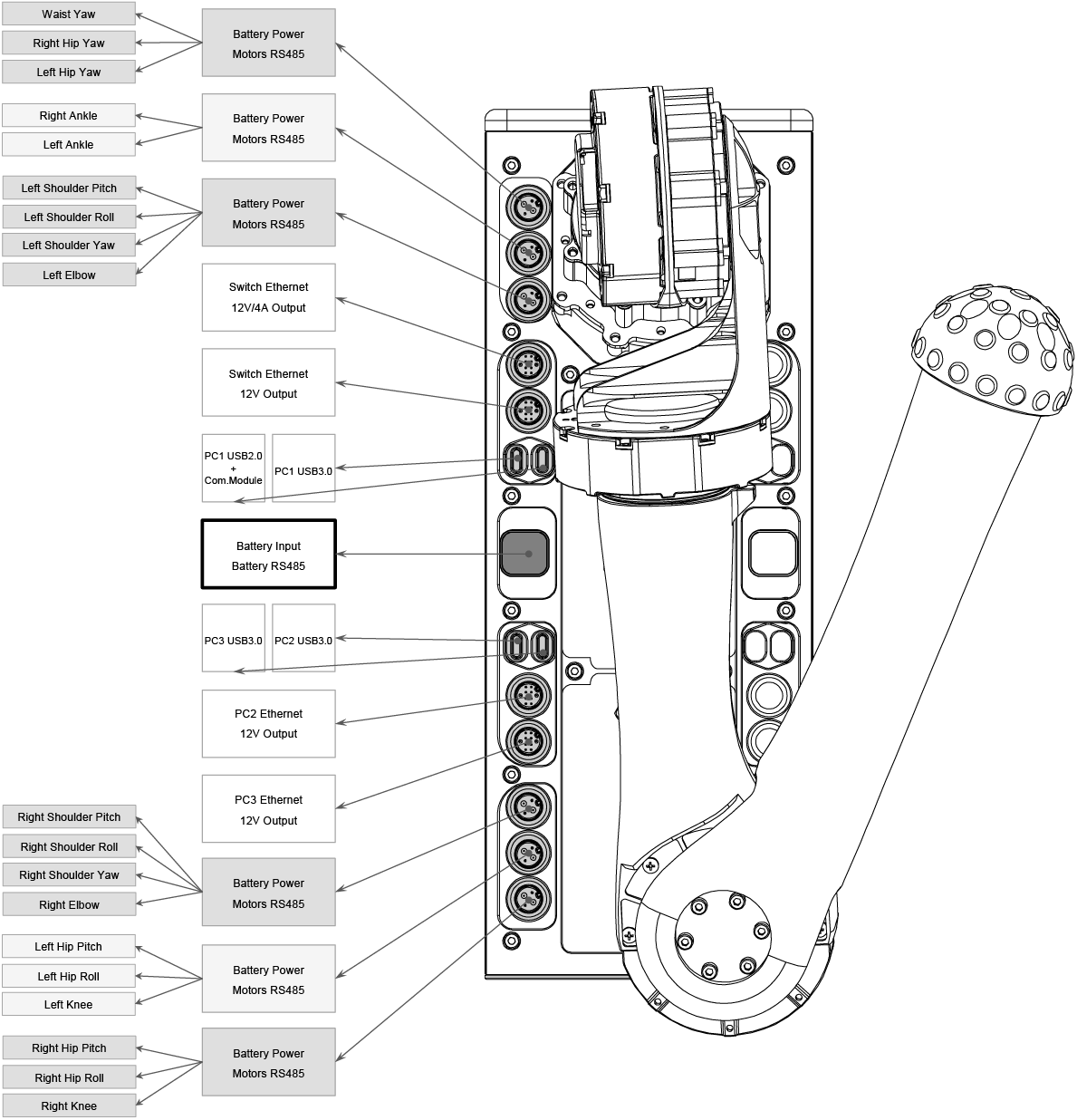
Hip joint × 3 + Knee joint × 1 + Ankle joint × 1 = 5. 4 DoF on each arm and expandable with end effectors. Power and communication interface available.
Knee Torque About 360N.m
>Hip Joint Torque About 220N.m
Ankle Torque About 45N.m
Arm Joint Torque About 75N.m
The H1 is equipped with 3 computers. Motion Control Computing Unit (PC 1) with a i5-1235U and 8GB of RAM. The “Motion Control Computing Unit” is dedicated to Unitree motion control programs and not available for external use. Developers can only use the “Development Computing Unit” for secondary development. Development Computing Unit (PC 2, PC 3) with 16GB and 32GB RAM. H1 robot’s head is equipped with the MID-360 Lidar. H1 robot’s head is equipped with the D435i depth camera. speed: 1.5m/s (Potential motion capability > 5m/s) Approximately 47kg.
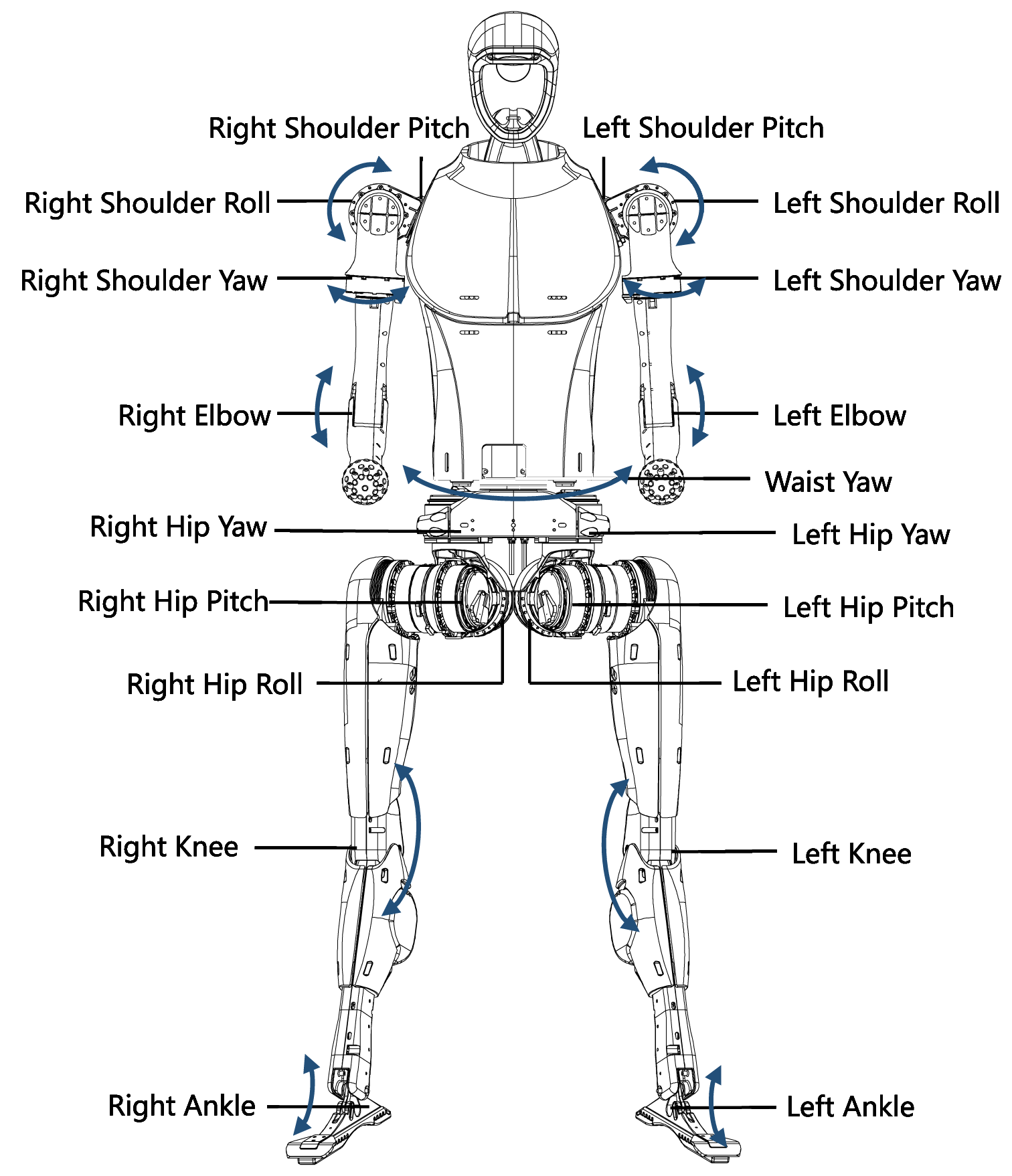
Below are the joint configuration for H1 robot
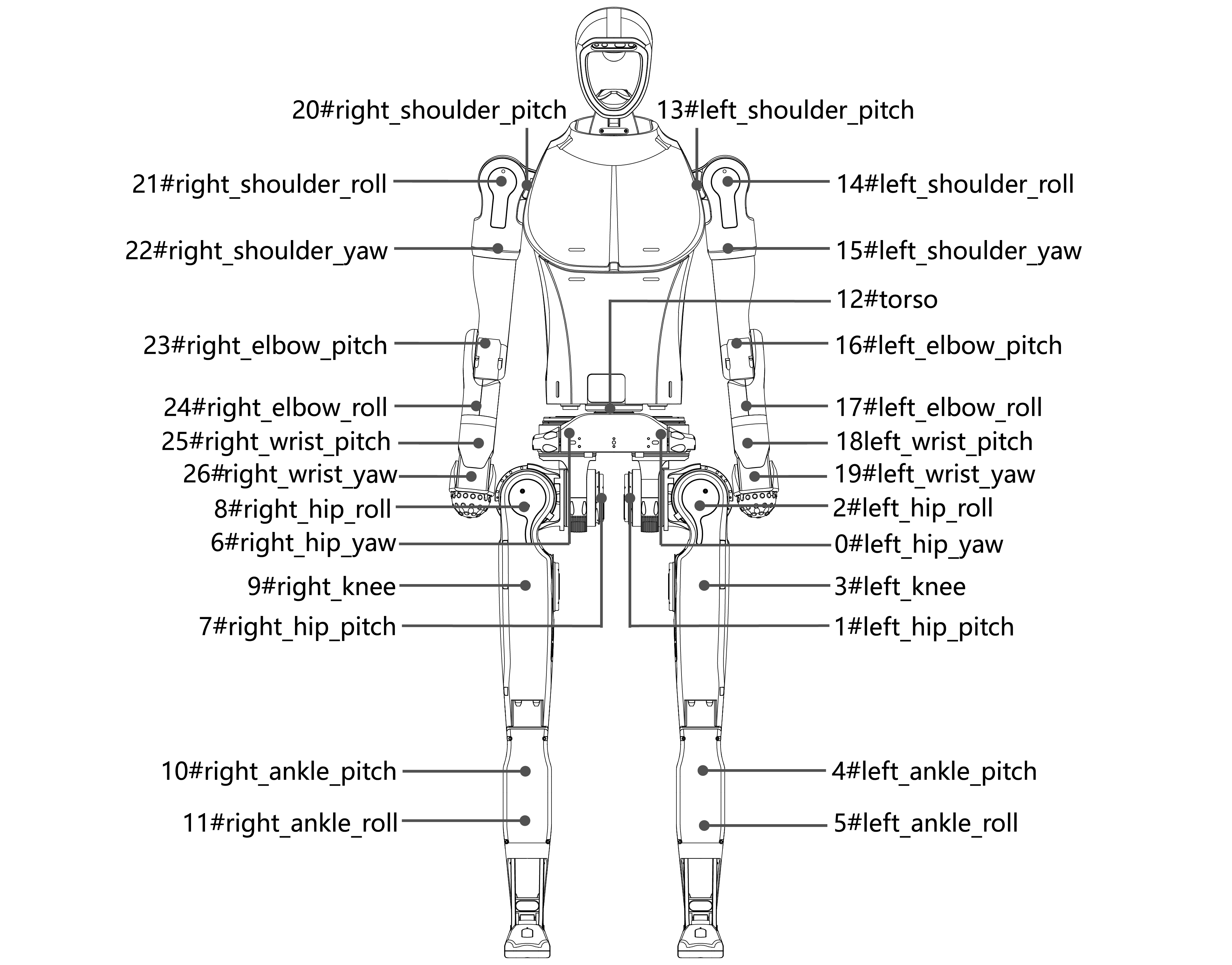
Below are the joint configuration for H1_2 robot
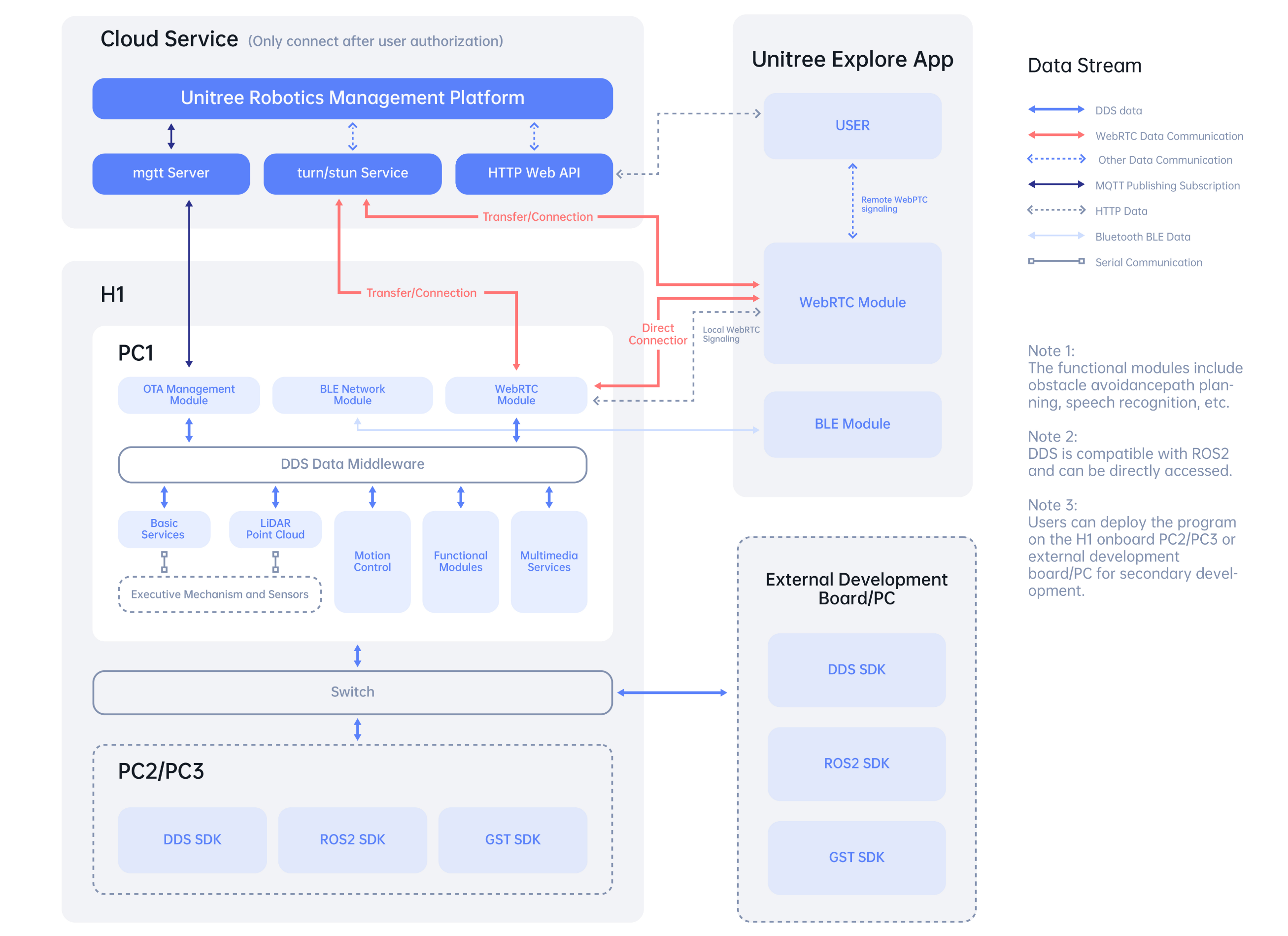
Here is the Software Architecture diagram for Unitree H1. The robot has 3 computers installed and makes use of DDS middleware. Full root user accress to PC2 and PC3 are available. Cloud services are dissabled by default, and are not required for normal operation.
In authorised by user The OTA module communicates with the cloud server through mqtt and is responsible for uploading fault information, system upgrades, and forwarding WebRTC signaling.
The Bluetooth (BLE) part is used to establish contact with the App and is mainly used for network configuration and security verification.
The communication between each functional module is mainly implemented by DDS. DDS IDL is compatible with ROS2 (you need to select the adapted RMW). The EDU version can call the interface through DDS or ROS2.
Sensor data such as motors and radars are collected through the serial port and then forwarded to the DDS middle layer.
H1 has 3 built-in computing units. PC1 is dedicated to the Unitree motion control program and is not open to the public. Developers can only use PC2\PC3 for secondary development.
DDS, supports C++ and Python. ROS2 interface. GST, for image transmission only.
Optional Autodiscovery HEAD360 would add a 4th computer to the architecture that is fully open to developpers and suppports DDS middleware.
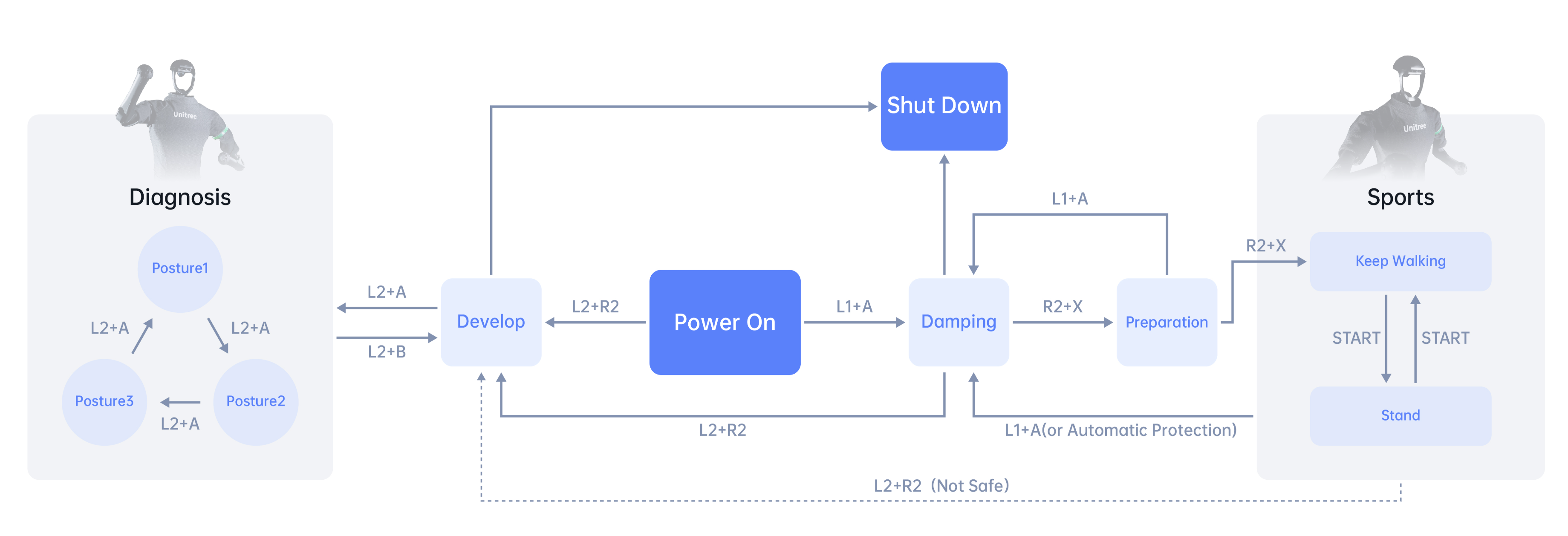
This diagram describes the operational modes using the remote controller for testing and demonstration purposes.