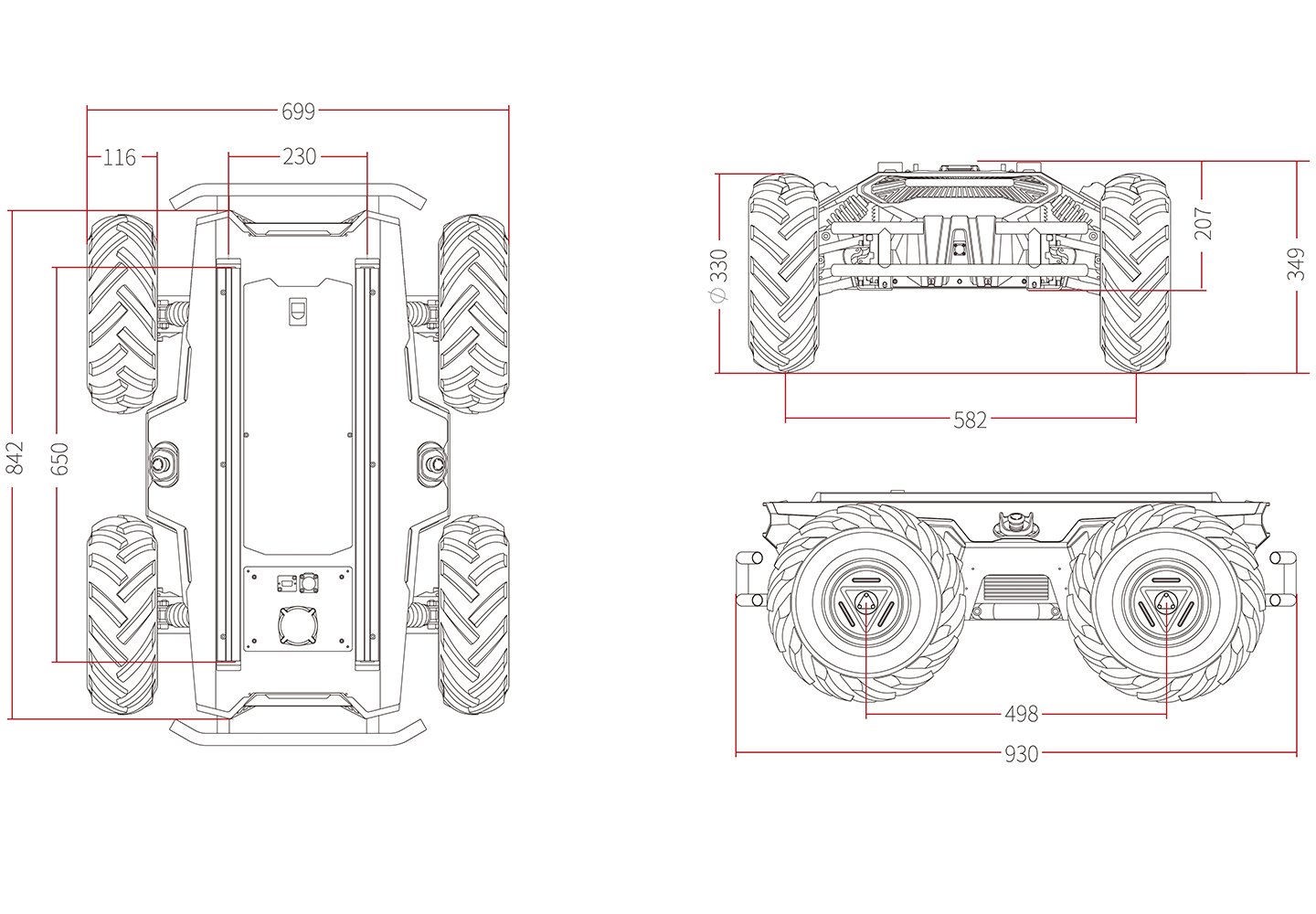
Scout 2.0 Platform
4 wheel drive large simple and robust robot platform.

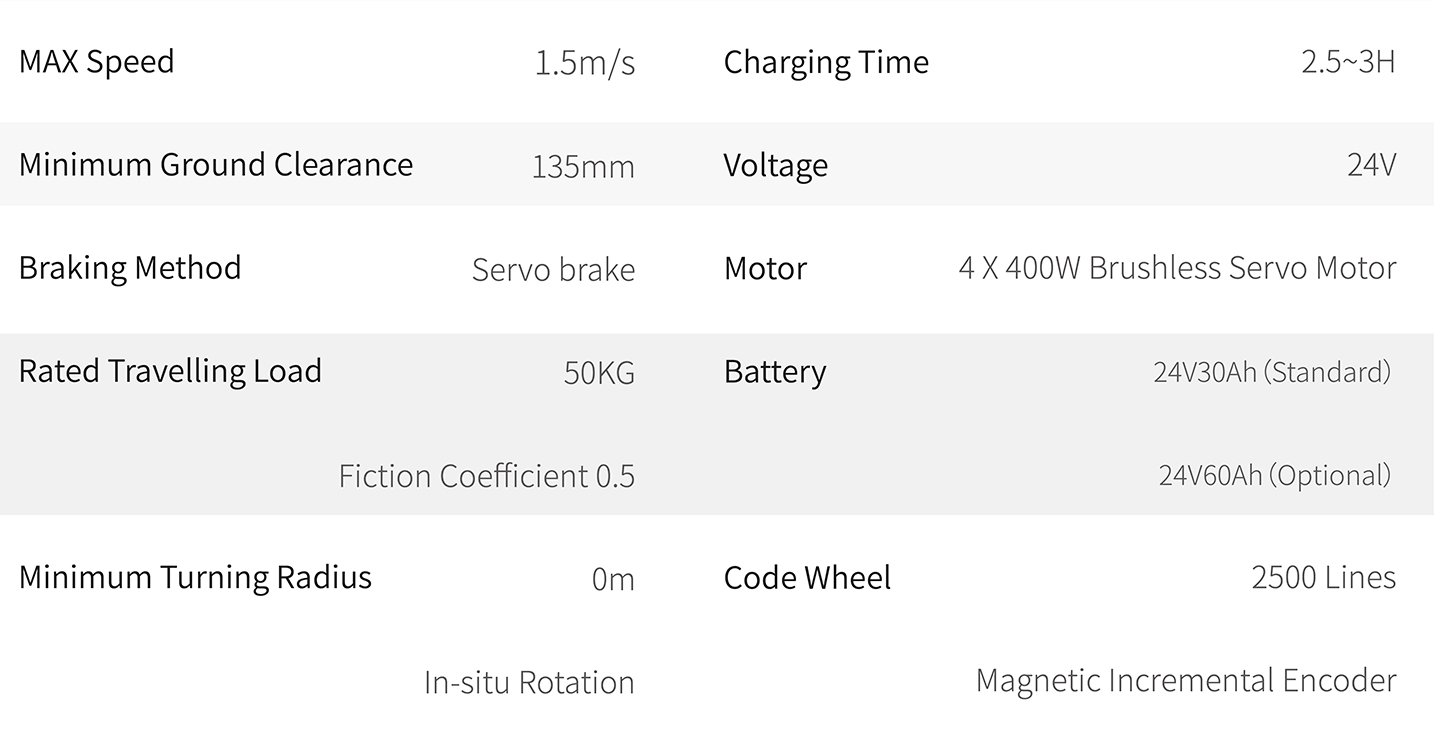
Efficeint, simple, robust. If you need a robot that always gets the job done this is the benchmark of reliability.
This ROS-compatible crawler mobile base is equipped with a CAN bus and RS-232 connectivity and is suitable for a wide range of applications.
Available digital twin assets for simulation environment Gazebo.
ROS compatible, either CAN bus or Serial RS-232 interface can be used for control. User manual avalable for download and code for interfaces available on Github